
GPS DAŽNUMO ETALONAS -KOMPARATORIUS
(Konstrukcija pakartota ir papildyta pagal LY3BD Aleksandro projektą.)
Noriu pasidalinti dar viena nauja savo konstrukcija. Tai GPS dažnio standarto priemonė. Naudodami šį įrenginį galite patikrinti ir kalibruoti dažnių skaitiklius, osciloskopus ir kalibruoti standartinius
5 ir 10 MHz etaloninius generatorius. Prietaiso išvestyje taip pat galite gauti keletą atskaitos dažnių: 0,25; 0,5; 1; 2; 4; 3; 6; 8; 12; 16 ,24 MHz. Ir tie patys dažniai padalinti iš 10. Sprendžiant iš literatūros
apie GPS signalus
duomenis, atskaitos dažnių tikslumas yra ne prastesnis nei 10 iki -12 laipsnyje.
Na, o dabar šiek tiek prieš istoriją. Kažkur 2013 metų
pabaigoje pasidariau imtuvą-komparatorių 66,6666 KHz etaloniniam siųstuvo
dažniui.http://www.qrz.lt/ly2bok/Rusian%20va...t/Standart.htm
Viskas mane tenkino, bet maždaug prieš dvejus metus 66,666 KHz dažniu trukdžiai nuolat pradėjo atsirasti pačiu netinkamiausiu momentu nuo bet kokios nekokybiškos buitinės technikos.
Jokie „šokiai su tamburinu“ ar su magnetine antena nepadėjo. Pradėjau ieškoti informacijos naudodamas GPS standartus. Imtuvuose, su kuriais susidūriau, viskas gražu ir gerai, išskyrus tai, kad
jie yra pririšti prie kompiuterio (be autonomijos) arba paruošimo laikas įjungus siekia 24 valandas! Tai man netiko. Taigi man pasisekė, aš aptikau šią svetainę https://www.eddy.com.ua/archives/149
Joje aprašomas GPS imtuvo dažnio standartas ir pateikiama valdiklio programinė įranga. Visiškai autonomiškas (nepririštas prie kompiuterio), pasirengimo laikas – maksimalus kelias minutes.
Kol imtuvas nepriims signalo iš palydovų. Nuoširdžiai dėkoju autoriui Eddi už jo konstrukciją!!! Remdamasis šiuo imtuvu, jį šiek tiek modifikavau, kad galėčiau naudoti šį imtuvą ne tik kaip
etaloninių dažnių šaltinį, bet ir kaip lyginamąjį elementą standartiniams 5 ir 10 MHz etaloniniams osciliatoriams tikrinti ir kalibruoti.

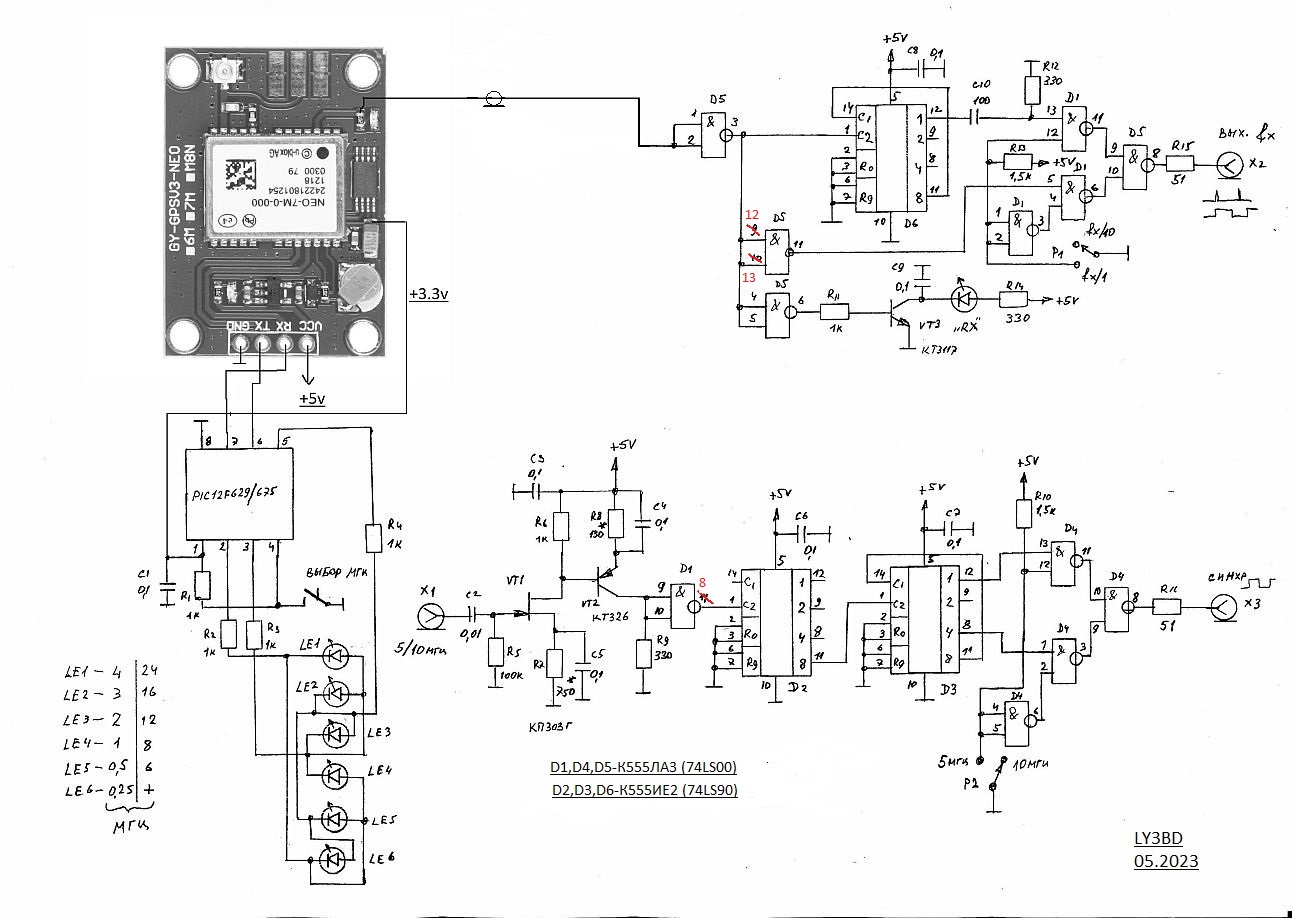
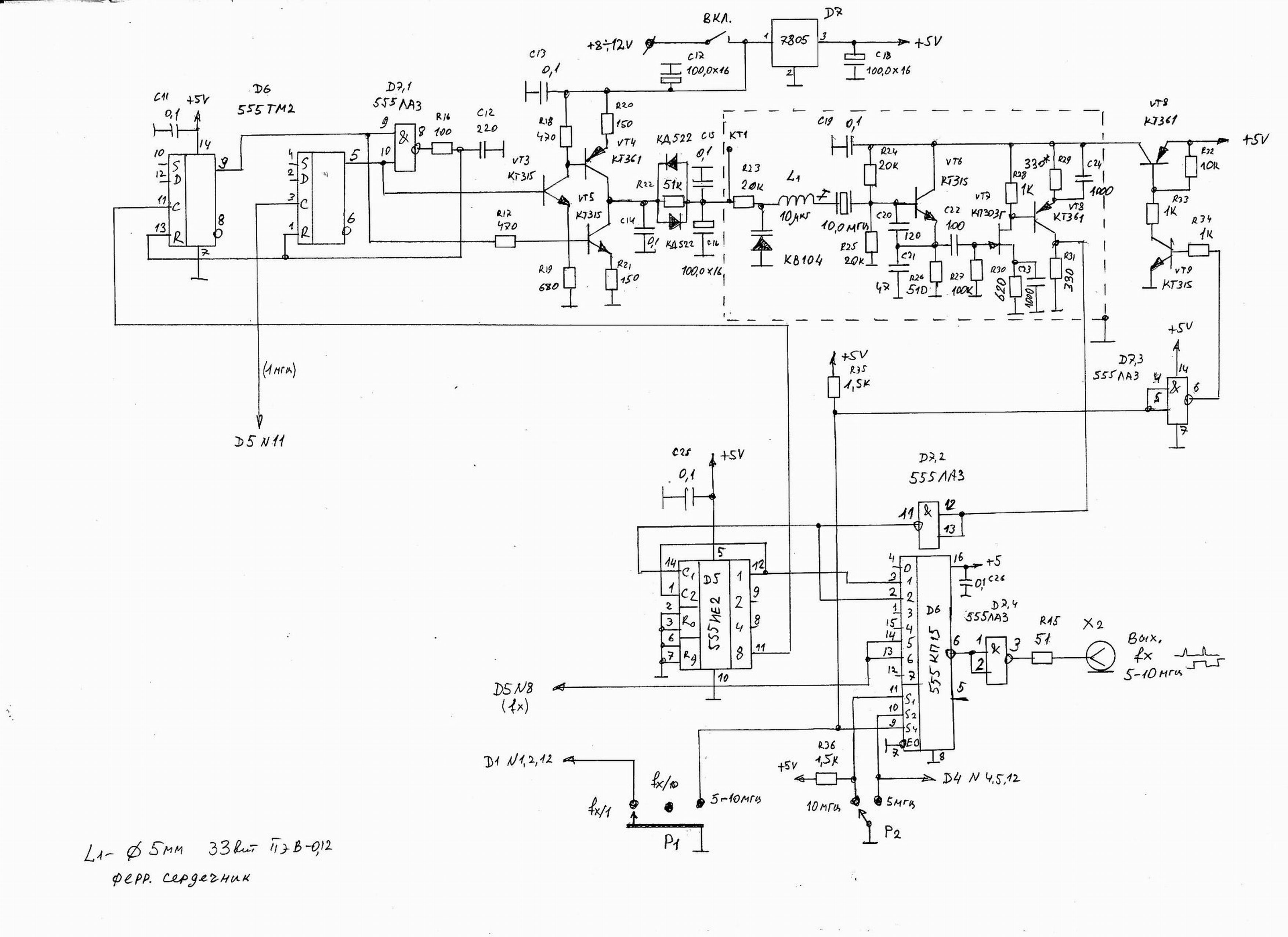
Dabar pagal schemą. Schema yra gana paprasta ir nereikalauja daug paaiškinimų. Iš karto noriu pažymėti, kad kaip GPS imtuvą turite naudoti NEO-7M, NEO-7N arba NEO-8 modulius.
Naudojant NEO-6
modulį, gali kilti problemų generuojant didesnius nei 4 MHz signalus.
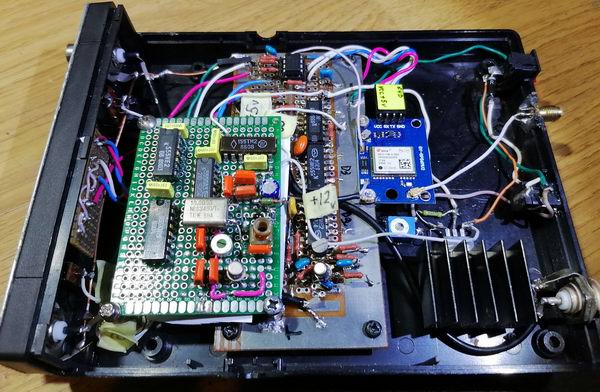
Aš nedariau spausdintinės plokštės, aš ją surinkau ant maketinės plokštės.
Korpusas nuo kažkokios stotelės, kuri atsidūrė po ranka.
Naudoju aktyvią, nuotolinę anteną su magnetu su 5 metrų kabeliu. Taip patogiau.
Anteną prikabinu prie lango atbrailos, langas nukreiptas į pietus ir jokių
problemų.
Kaip indikatorių lyginamuoju režimu naudoju skaitmeninį osciloskopą, bet galima
naudoti ir analoginį. Signalą iš X2 išvesties perduodame į įėjimą „U-1“ (pagal
schemą).
Į 5/10 MHz standarto (X1) įvestį perduodame signalą iš tikrinamo 5 arba 10 MHz
generatoriaus išėjimo, perjungiame jungiklį P2 į atitinkamą padėtį, o iš
„sinchronizavimo“ išvesties signalą
perduodame į
antroji osciloskopo įvestis „U-2“. Osciloskopą sinchronizuojame iš kanalo „U-2“.
Nustatome skleistinę 500ns.
Standarto išvestyje nustatome 2 MHz dažnį, standarto jungiklį P1 į padėtį fx/10.
Osciloskopo ekrane matome paveikslėlį.
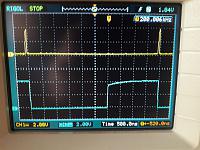
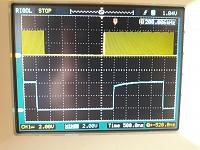
Šiame paveikslėlyje matome, kad impulsai pasislinko į
kairę beveik pusę laikotarpio. Žinodami laiką, per kurį impulsai pasislinks
tiksliai periodu, galime apskaičiuoti bandomojo generatoriaus dažnio
nuokrypį nuo standarto. Galite jį apskaičiuoti naudodami formulę
0,001:(sek.*200)=apytikslė skiriamoji geba.
Kur: sek. impulso poslinkio laikas per periodą 200 KHz atskaitos dažnis *
daugybos ženklas
Pavyzdžiui, poslinkio į kairę laikas 10 sekundžių. tada 0,001:(10*200)=0,000
0005 Tai atitinka -5*10 laipsniui -7.
Jei naudojate įprastą osciloskopą, signalas iš jungties X2 (pagal schemą) nukreipiamas į „U“ įvestį ir sinchronizavimo signalą. į išorinę osciloskopo trigerio įvestį. Osciloskopas turi būti išorinio
paleidimo režimu. Ir tada, kaip
aprašyta aukščiau.
Jei mums reikia gauti vieną iš atskaitos dažnių kalibratoriaus išvestyje,
nustatykite jungiklį P1 į padėtį fx/1. Dažniai parenkami naudojant mygtuką „MHz
pasirinkimas“. Dažniai perjungiami
nuosekliai ratu. Signalas paimamas iš jungties X2.
Schemos papildymas dėl 5 ir 10 MHz
Tęsiant temą, nedidelis standarto
pakeitimas, leidžiantis gauti dar du „apvalius“ 5 ir 10 MHz dažnius. Forume yra
nauja tema panašia tema
http://www.cqham.ru/forum/showthread...4%F3%EB%E5-GPS Tačiau
šis metodas turi reikšmingą trūkumą. Mano versijoje naudojama PLL sistema su
gana didele laiko konstanta, kuri leidžia sumažinti virpesį. Kodėl pasirinkau 5
ir 10 MHz? Tai yra standartiniai etaloniniai generatorių dažniai daugeliui
pramoninių dažnių matuokliams. Aš naudoju 5 MHz signalą kaip išorinę atskaitą
savo Ch3-63/1 dažnio matuokliui. Tuo pačiu metu man nereikia laukti daugiau nei
valandos, kol dažnio skaitiklio atskaitos generatorius sušils, kad gaučiau
didžiausią įmanomą tikslumą.
Dabar pagal schemą. PLL veikia 1MHz dažniu. Todėl reikia nustatyti GPS išvesties
dažnį į 1MHz. Šis dažnis tiekiamas į dažnio-fazės detektoriaus įvestį. Į antrąjį
dažnio-fazės detektoriaus įvestį tiekiamas signalas iš daliklio išvesties iš 10
( D5). Daliklio įėjimas gauna 10 MHz signalą iš įtampos valdomo kvarcinio
generatoriaus su PLL išėjimo. Tokiu būdu gauname atskaitos dažnį 10MHz. Manau,
aišku, kaip prie pagrindinės grandinės prijungti papildomą plokštę su PLL.
Elementų numeracija PLL grandinėje yra nenutrūkstama su pagrindine grandine. P1
jungiklis buvo pakeistas 3 padėčių jungikliu (buvo 2). Atsirado 5-10MHz
padėtis. Šioje padėtyje kristalų generatorius yra įjungtas. Dažnio pasirinkimas
standarto išvestyje šiame režime pasirenkamas jungikliu P2 5 arba 10 MHz.
Jungtis X2 buvo prijungta prie lusto D5 išvesties N8, dabar - prie D7 lusto N3
išvesties. Iš jungties X2 paimamas 5 arba 10 MHz dažnis.
Kai pirmą kartą įjungiate ir sukonfigūruojate PLL, turite stebėti įtampą valdymo
taške KT1 su voltmetru. Perjunkite jungiklį P1 į padėtį 5-10MHz, pasirinkite GPS
dažnį 1MHz. Sukant ritės L1 šerdį, PLL aktyvuojamas. Šiuo atveju įtampa L1
turėtų keistis, kai šerdis sukasi. Sukamąja šerdimi L1 nustatykite įtampą
valdymo taške KT1 iki maždaug +3 voltų.
Ritė L1 suvyniota ant 5 mm skersmens rėmo, šerdis – feritas.
LY3BD prietaiso variantas .



PIC kontrolerio programa: Programa
LY2BOK Justinas